原文摘要
从淘汰马车的那一刻起,人类就开始对自动驾驶感兴趣,事实上,打造一辆无人车的这件事,已经悄然走过了一个多世纪,甚至,15世纪的达·芬奇都画过无人驾驶车的草图。
从设计自动化的高速公路,自主移动的军用卡车,再到加州沙漠里的无人车大赛,从美国,到日本,再到欧洲,自动驾驶的研究跨越了整个地球,逐渐走进我们的生活。
本期节目,我们讲述那些脑洞大开的疯狂创意、关键的技术突破与背后执着的工程师们,为你揭开自动驾驶“爆发前夜”的漫长序章..
【时间轴】
(一)神话
0:54 自动驾驶和辅助驾驶到底是怎么分的 ?出了事故谁负责?
7:30 实际上,马车也是一种自动驾驶
8:29 最早的生物智能:鸽子制导的导弹,您听说过吗?
11:27 从达芬奇的自动驾驶发条车讲起
13:24 自动导航的鱼雷是现代自动驾驶的开端
15:42 最早的智能小车:只要你开灯,我就敢开枪的“机器狗“
15:55 最早的无人驾驶汽车“美国奇迹”
21:26 苏联人的遥控坦克
(二)传说
22:50 1939年的世界博览会,开启了现代自动驾驶时代
28:31 “电子高速公路”最早的制动机是解决方案
32:41 通用公司的脑洞:梦幻的火鸟2汽车
34:27 美国人的自动高速公路幻想
40:57 我们要怎么遥控有2.5秒延迟的月球车?
48:05 脑洞之王:美国国防部高级计划研究局
54:14 可以沿着白线行走的斯坦福小车
58:15 可以穿越摆满椅子的斯坦福小车
1:03:43 日本自动即使技术的研究和误入歧途
1:16:26 80年代美国人的自动装甲车ALV
1:23:49 欧洲人的力量,车道保持和自适应巡航的发明
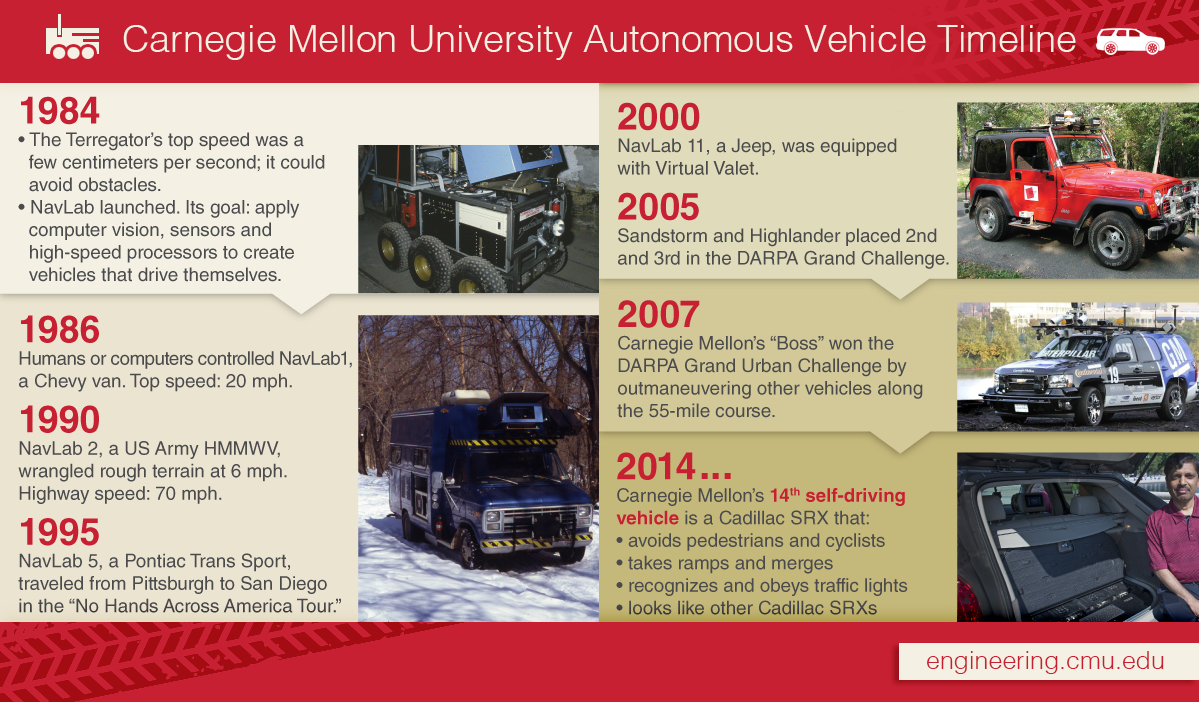
1:32:44 卡内基梅隆大学的NavLab 以软件为核心的自动驾驶思想
1:36:57 新里程碑:神经网络技术引入到自动驾驶
(三)当代
1:45:33 阿富汗战争使得自动汽车的需求变得急切
1:47:04 厄姆森的野望,著名的DARPA无人车大赛第一次比赛
1:56:51 小课堂:无人驾驶导航机制的基本原理
2:04:13 DARPA无人车大赛第二次比赛,斯坦福的特隆轻松夺冠
2:14:47 在城市道路举办第三次比赛,卡内基梅隆的荣誉之战
2:20:00 从高精地图说起,特隆和厄姆森双双计入Google X实验室,全力推进自动驾驶!
2:23:22 2008年,Google开始了自动驾驶项目
2:32:10 自动驾驶技术的分岔口:每天练习跳高可不能登上月球。
2:39:46 苹果公司的自动驾驶汽车小传
2:41:07 Google的Waymo成立,标志着自动驾驶的商用
2:47:51 马斯克的第一性原理下的特斯拉自动驾驶技术
2:55:05 我们到底 是要造一个昆虫还是一匹马?
(三)未来
3:01:53 自动驾驶普及的时候,人类还会被允许开车吗?
【提到的人物和资料】
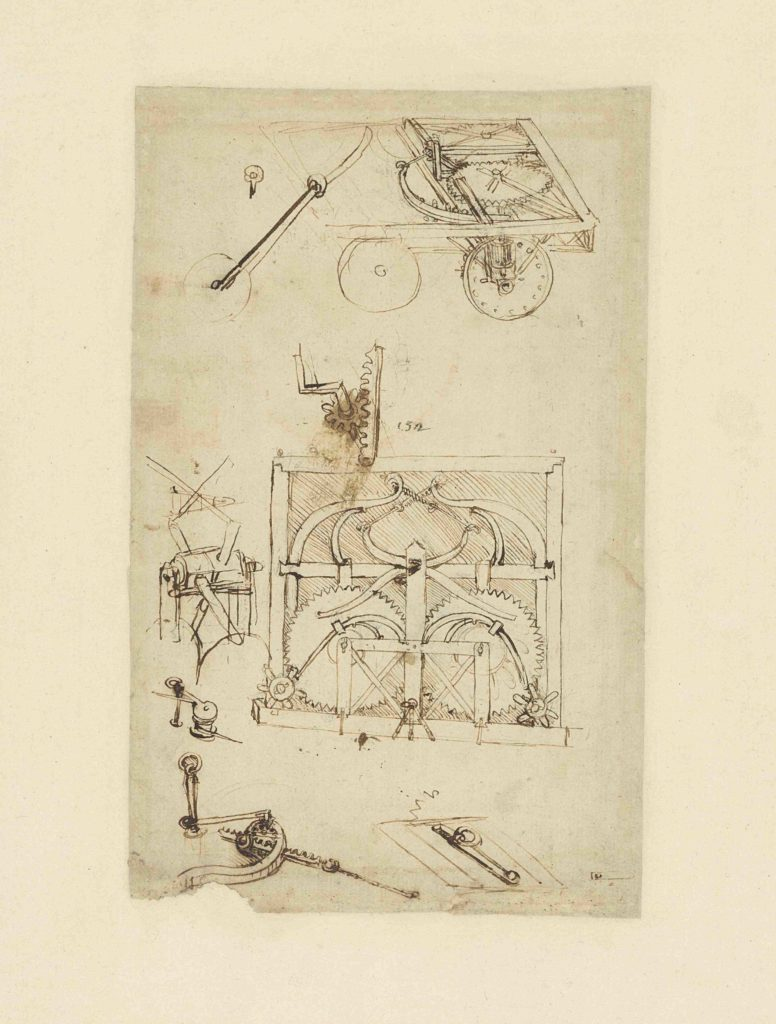
达芬奇设计的自动车,使用发条作为动力
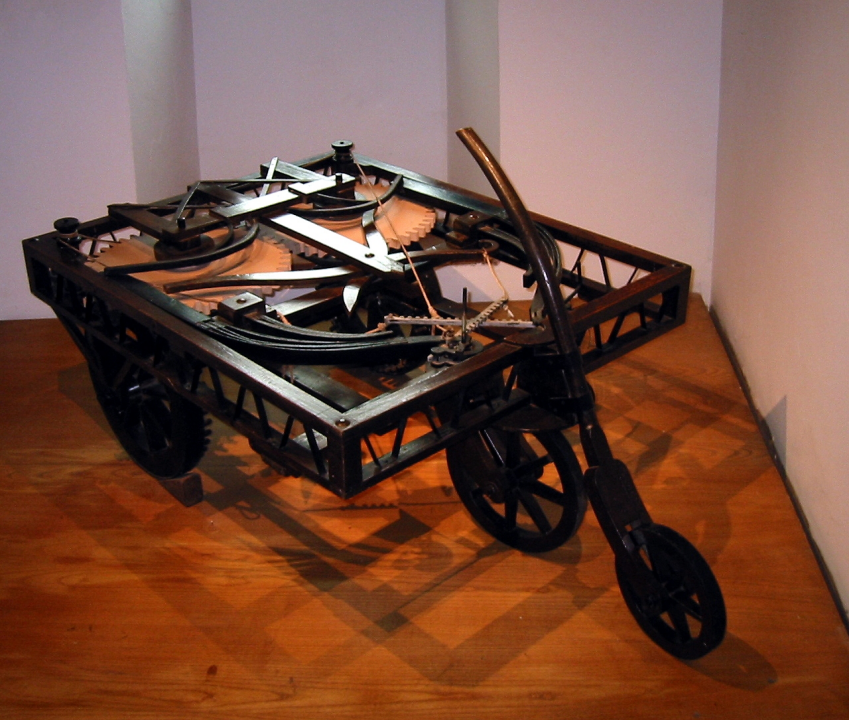
1905年,一个名叫奇罗拉莫·加尔维的意大利学者按照笔记上的记载,复原了达芬奇的车子模型,并把它比喻作“达·芬奇的菲亚特”。
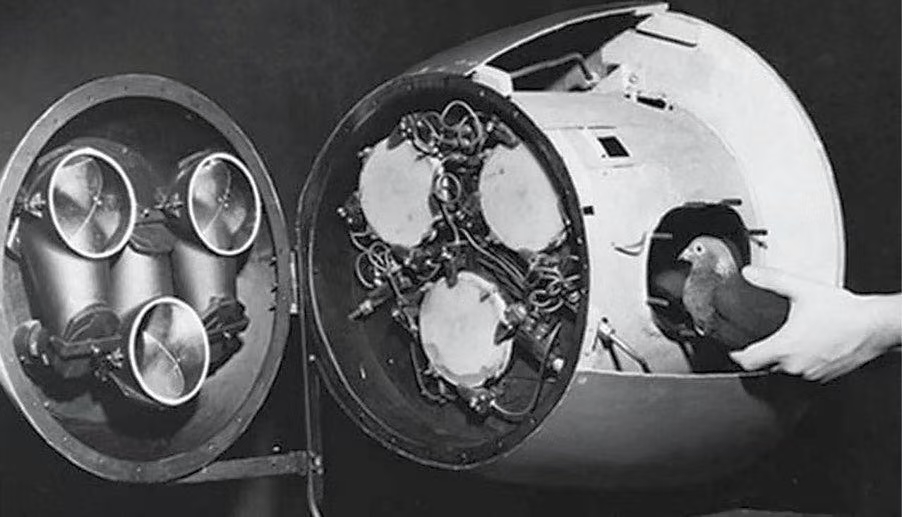
1944年,一个名为伯尔赫斯·弗雷德里克·斯金纳(Burhrus Frederic Skinner)的美国人发明了使用鸽子导航的导弹

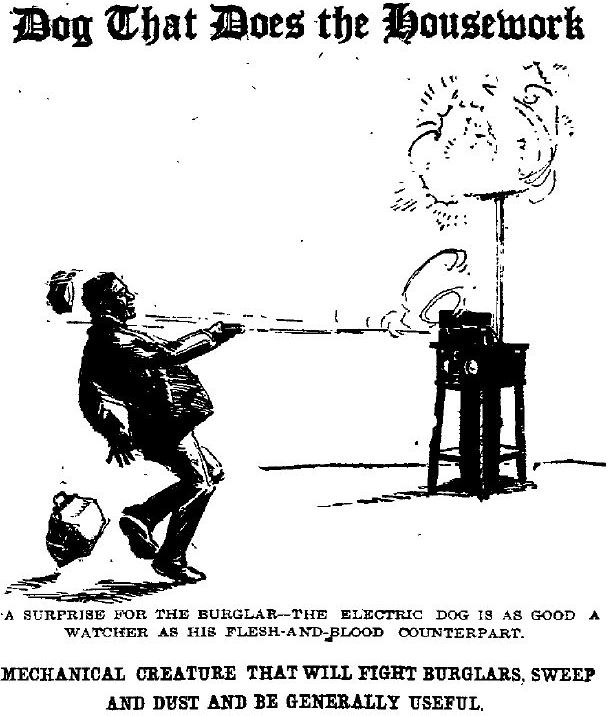
哈蒙德公司生产的,使用硒感光元件的机器狗,如果有光亮,就会作出反应,甚至,可以开枪。


纽约于1939年和1964年举办的世博会上,通用汽车带来的“飞出个未来”展馆都是万众瞩目的焦点,这个展览展示了电子高速公路的模型。

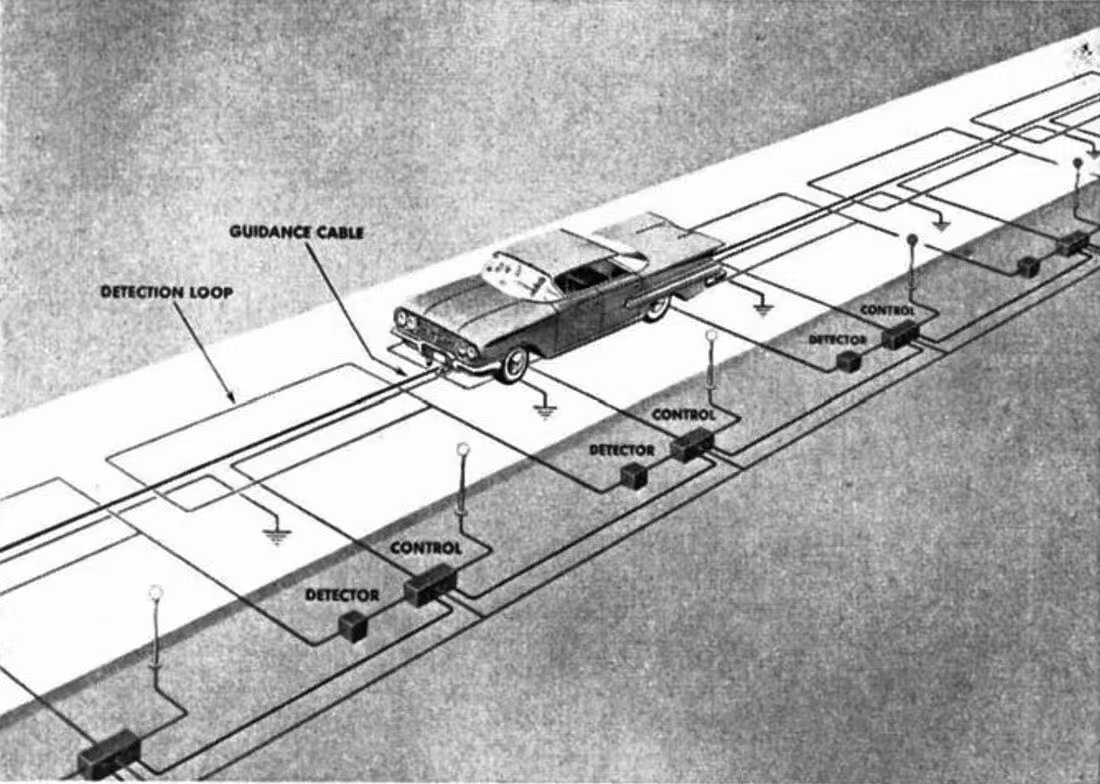
自动高速公路的模型和原理图,使用埋在地下的电磁线圈,给车辆提供动力和导航

1958 年在内布拉斯加州林肯市郊一个专门准备的新路口进行的一项实验,其中两辆雪佛兰乘用车配备了美国无线电公司(RCA)的专用无线电接收器以及可激活转向机构、加速和制动的声光报警装置。
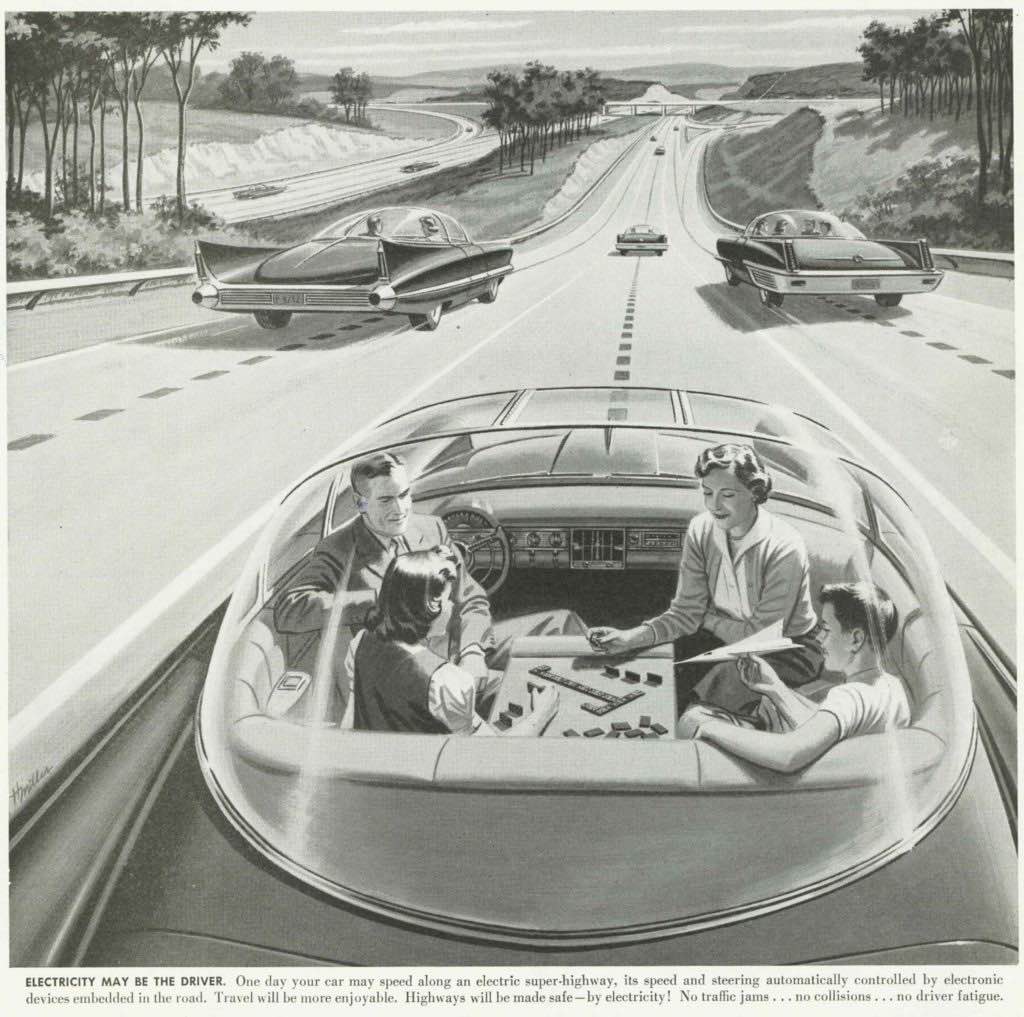
美国人关于自动驾驶汽车研发成功后的想象,一家人在汽车里打牌

第一台登上月球的月球车,苏联的月球一号,拥有若干摄像头
第一台真正意义上的自动驾驶智能机器人——斯坦福月球车。1960年,斯坦福大学机械工程系研究生詹姆斯·亚当斯制造了这辆车:“这辆车有四个小自行车轮,由汽车电池供电的电动机驱动,携带一个电视摄像机,固定在前方的视野中。
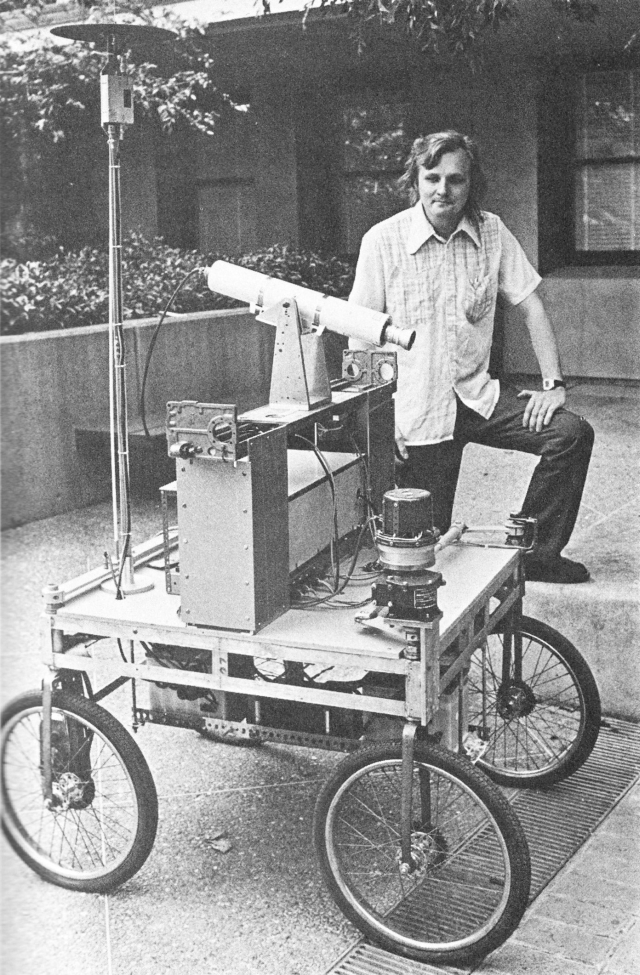
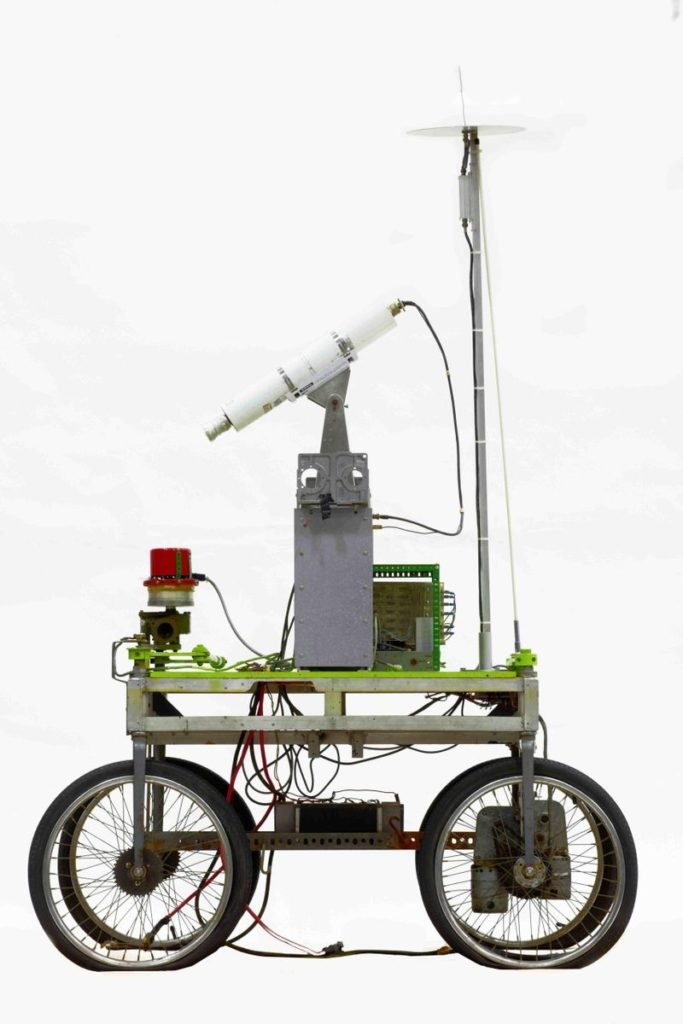
1977 年左右,年轻的汉斯·莫拉维克 (Hans Moravec) 与斯坦福手推车,摄像机放置在一个滑块上,这样可以拍摄视差图片。

莫拉维克的小车可以穿越有障碍物的房间

80年代初,莫拉维克在卡内基梅隆大学的时候,设计冥王星(左)和它更年轻、更复杂的兄弟——海王星(右)..

70年代,日本自动驾驶的研究车辆,在车辆上安装的上下摄像头,这样可以看到高出地面的物体,然后躲避。

1987年,富士山附近的箱根测试跑道上的日产民用巴士PVS(个人车辆系统)。
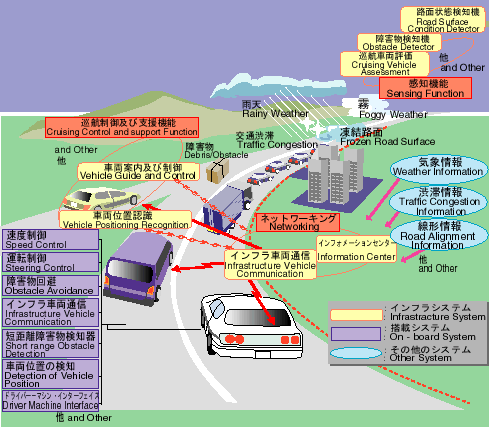
90年代,日本政府主导的AHS系统——先进的巡航辅助高速公路系统
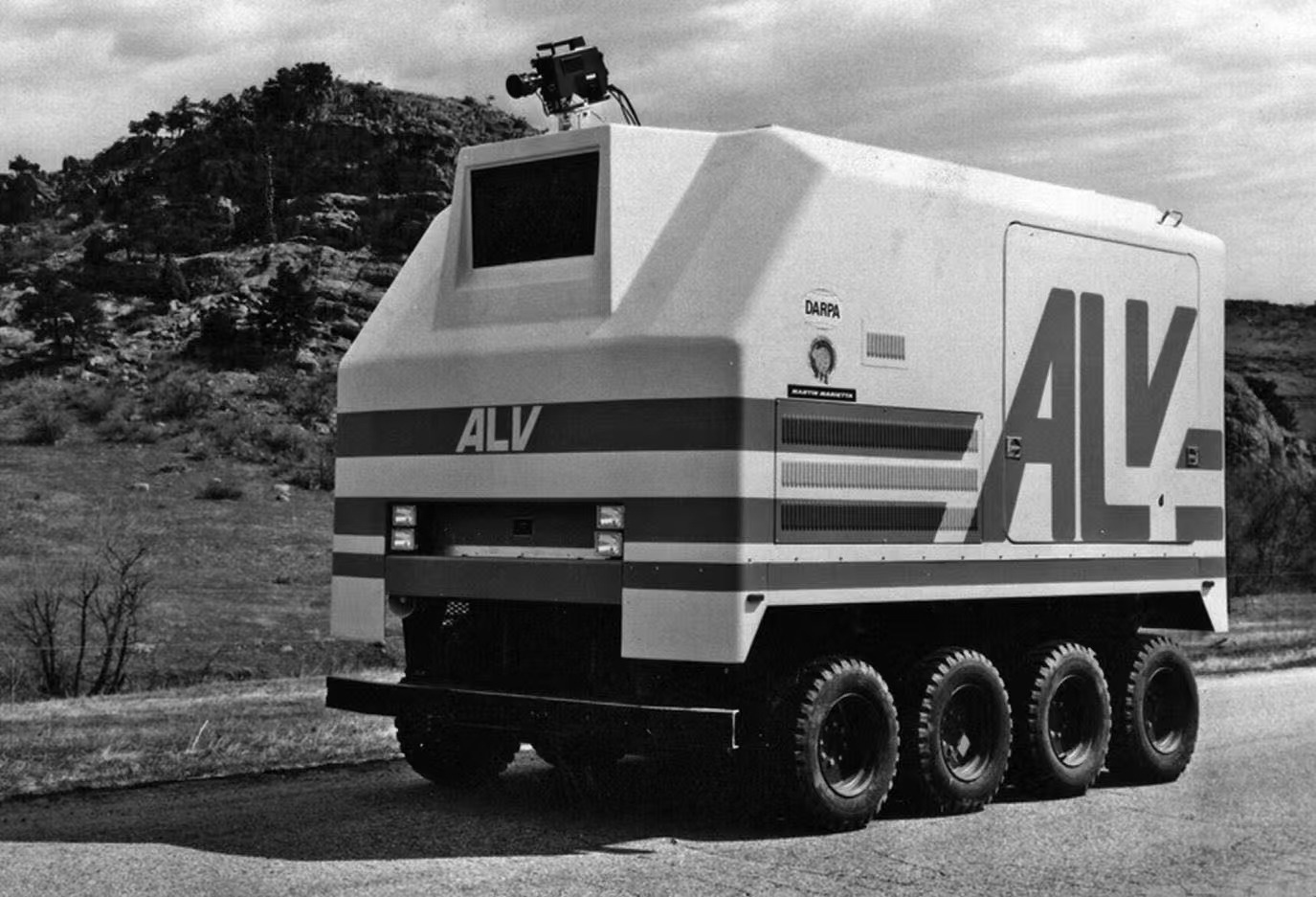
1984年马丁公司为美国国防部高级计划研究局设计的ALV自动驾驶汽车

1984年卡内基梅隆大学的第一辆NavLab卡车,用一辆雪佛兰汽车改装

基于陆军悍马车的Navlab2卡车,实现了人工智能神经网络导航

著名的NavLab5,入选了2007年机器人名人堂

威廉·L· “雷德” ·惠特克 (William L. " Red " Whittaker,生于 1948 年) ,现任卡内基梅隆大学机器人学研究教授,他带领 Tartan Racing 车队在 2007 年 DARPA 城市挑战赛中夺得冠军。

参加DARPA越野挑战赛的卡内基梅隆大学的Red智能车,头顶的大球,是激光测距仪

斯坦福的大学的“斯坦利”参加了第二届DARPA越野挑战赛,夺得了冠军,之所以刷成蓝色,是因为卡内基梅隆大学占用了红色的车身

Google的萤火虫无人驾驶小车
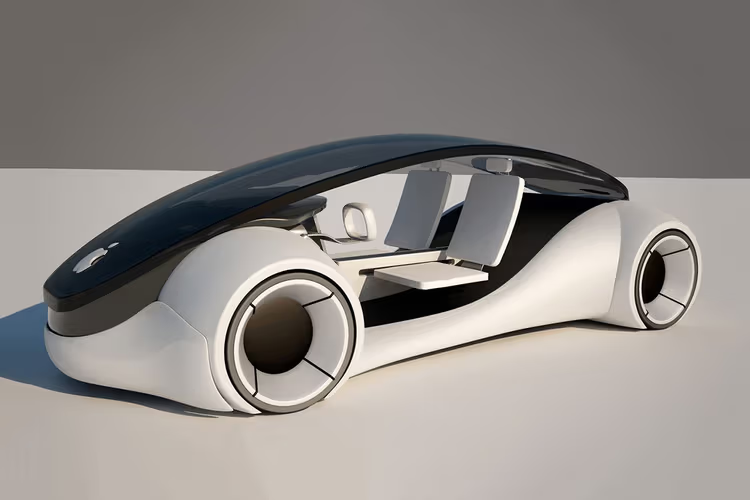
苹果汽车概念图,可惜,苹果在2024年取消了汽车项目

Google的waymo无人驾驶出租车

通用公司的Cruise无人驾驶出租车,去年退出是市场

在奥斯丁测试的特斯拉自动驾驶汽车
左边为循序渐进挑战L4的厂家,右边是一步到位之间部署L4级别无人车的公司
【本期主播】剑锋,寒芽
【参考书籍】
From Automated to Autonomous Driving A Transnational Researc
Autonomy. The Quest to Build the Driverless Car - And How It
How Autonomous Vehicles Will Change the World Why Self-Drivi
Robot, Take the Wheel The Road to Autonomous Cars and the Lo
AI Self-Driving Cars Divulgement Practical Advances In Artif
Driven - The Race to Create the Autonomous Car
Autonomous Driving Technical, Legal and Social Aspects
自动驾驶之争 (【美】亚历克斯·戴维斯
【音乐】Queen - Don't Stop Me Now
进一步信息揣测
- 自动驾驶责任划分的灰色地带:虽然文章提到事故责任问题,但未明确说明实际商业落地中,车企与用户之间的责任划分往往通过冗长的用户协议规避,且L3级以上系统的责任认定仍存在法律空白。
- 军用技术民用化的隐性门槛:DARPA大赛的获胜团队(如斯坦福、卡内基梅隆)直接进入Google X实验室,揭示了顶尖自动驾驶技术早期由军方资助,后通过“旋转门”机制流入商业公司,普通企业难以获取核心资源。
- 高精地图的垄断性成本:特隆团队依赖的高精地图技术,实际采集成本高达每公里数千美元,且需持续更新,中小公司无法承担,形成行业巨头(如Waymo、百度)的护城河。
- 神经网络技术的黑箱风险:尽管神经网络被列为里程碑,但行业内部深知其可解释性差,事故调试困难,部分车企私下仍依赖传统规则算法兜底,但对外宣传刻意弱化此点。
- 特斯拉的“第一性原理”陷阱:马斯克推崇的纯视觉方案实为降低成本之举,激光雷达厂商透露特斯拉曾秘密测试LiDAR但因价格放弃,而极端依赖数据迭代的模式导致长尾问题解决缓慢。
- 日本自动驾驶的失败根源:80年代日本误判技术路线(如过度依赖道路磁钉),实因官僚体系主导研发,企业为补贴盲目跟风,而非市场需求驱动。
- 苹果自动驾驶的隐秘策略:苹果CarPlay实为数据采集工具,通过用户驾驶习惯反哺自动驾驶算法,但以“生态扩展”名义掩盖真实目的。
- 政策与技术的博弈:欧洲早期车道保持技术普及快,是因法规强制安装AEB系统,而非技术领先,车企被迫将研发重心转向合规性而非创新。
- 月球车延迟控制的军转民技术:2.5秒延迟控制算法后被用于卫星通信和偏远地区自动驾驶,但相关专利被洛克希德·马丁等军工企业垄断,民用需支付高额授权费。
- Waymo商业化的隐藏障碍:Waymo虽率先商用,但内部评估显示其凤凰城运营区90%道路为结构化简单路况,复杂城市场景仍需安全员,真实能力与宣传存在差距。